
My Projects

Mobile Robot Receptionist 2.0
2024 - OngoingDesigned a multi-floor navigation framework expanding 2D mapping and navigation techniques. Developed Gazebo plugins for elevator simulations and implemented behavior trees for automating multi-floor navigation.
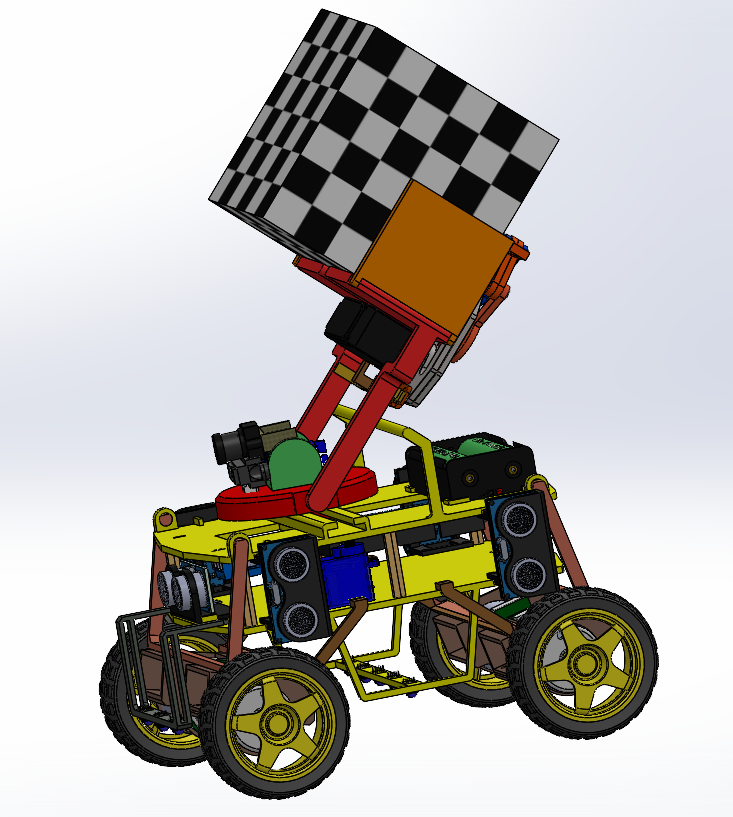
Voyager: Mobile Robot Platform
2024 - 2025Developed mobile robot platform with SLAM, Nav2, and teleop from scratch with ROS2 and Gazebo. Designed SolidWorks enclosure and assembled the robot hardware with custom sensors integration.
Hydra: 6 DOF Robot Manipulator
2024 - OngoingDeveloped ROS2 workspace for manipulator simulations with Moveit2. Designed the robot in SolidWorks, assembled the manipulator, and tested the hardware interface.

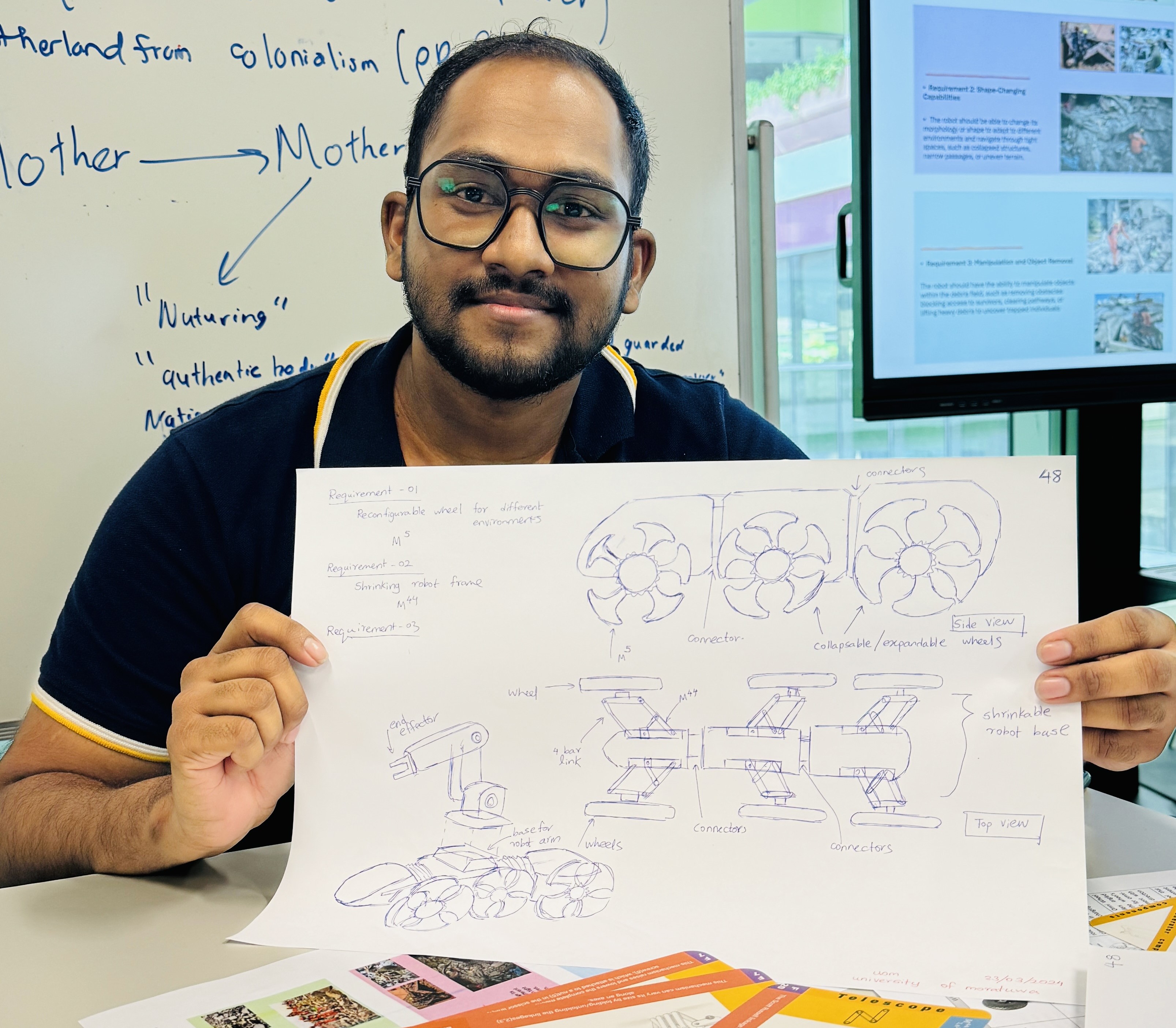
RoboRoarz Robot Challenge, Singapore
2024Developed algorithms for Smorphi reconfigurable robot platform. Designed reconfigurable robot concepts for disaster management and participated in robotics workshops.

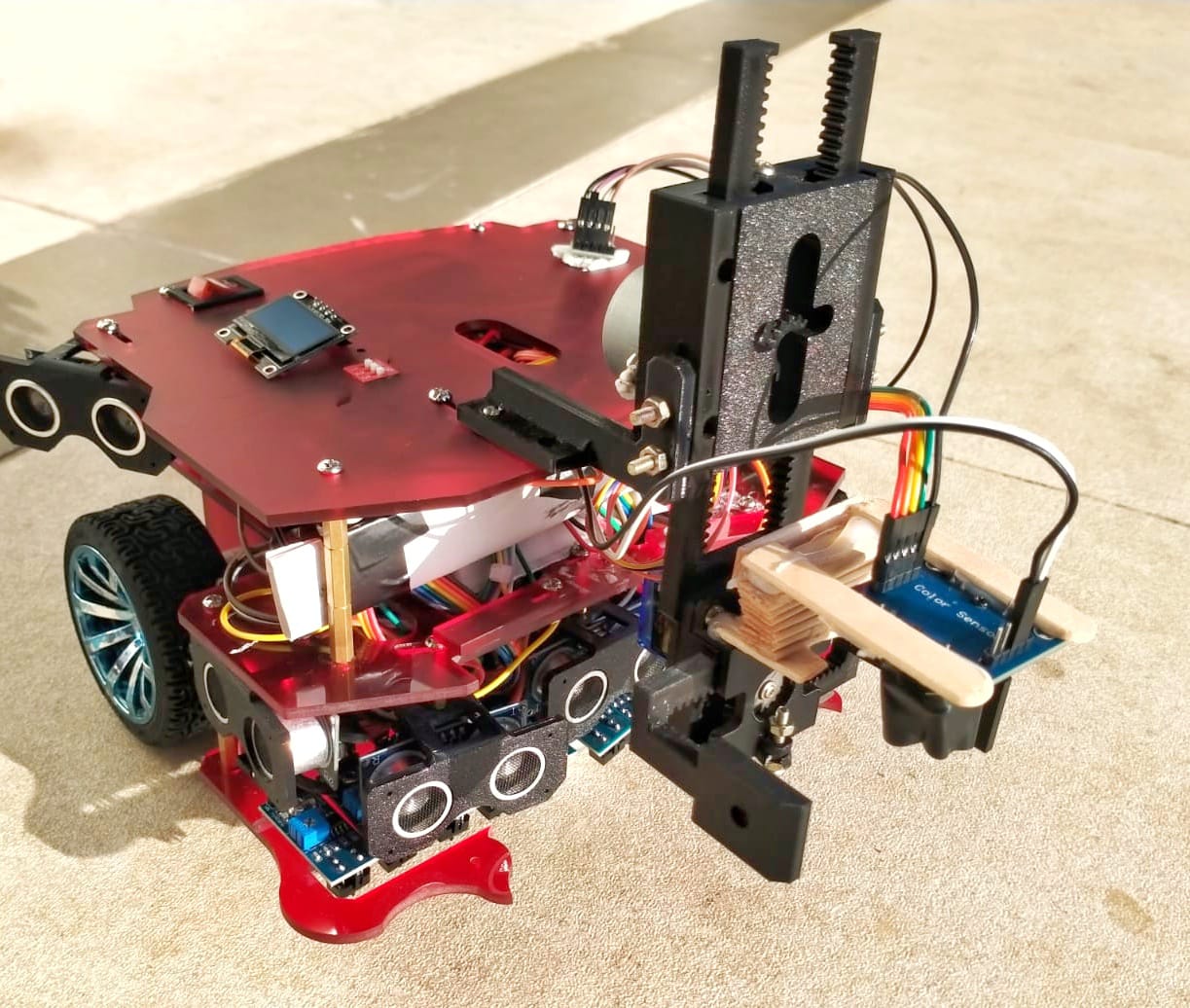
Sri Lankan Robotics Challenge (University)
2022Implemented algorithms to solve the Tower of Hanoi using custom manipulators. Designed robot hardware configurations and tested software and hardware setup.

Spark Innovation Challenge: AlgaGen
2023Designed a prototype for hydrogen generation using tidal waves as a clean renewable energy source. Conducted year-long research proving the concept and achieving project milestones.
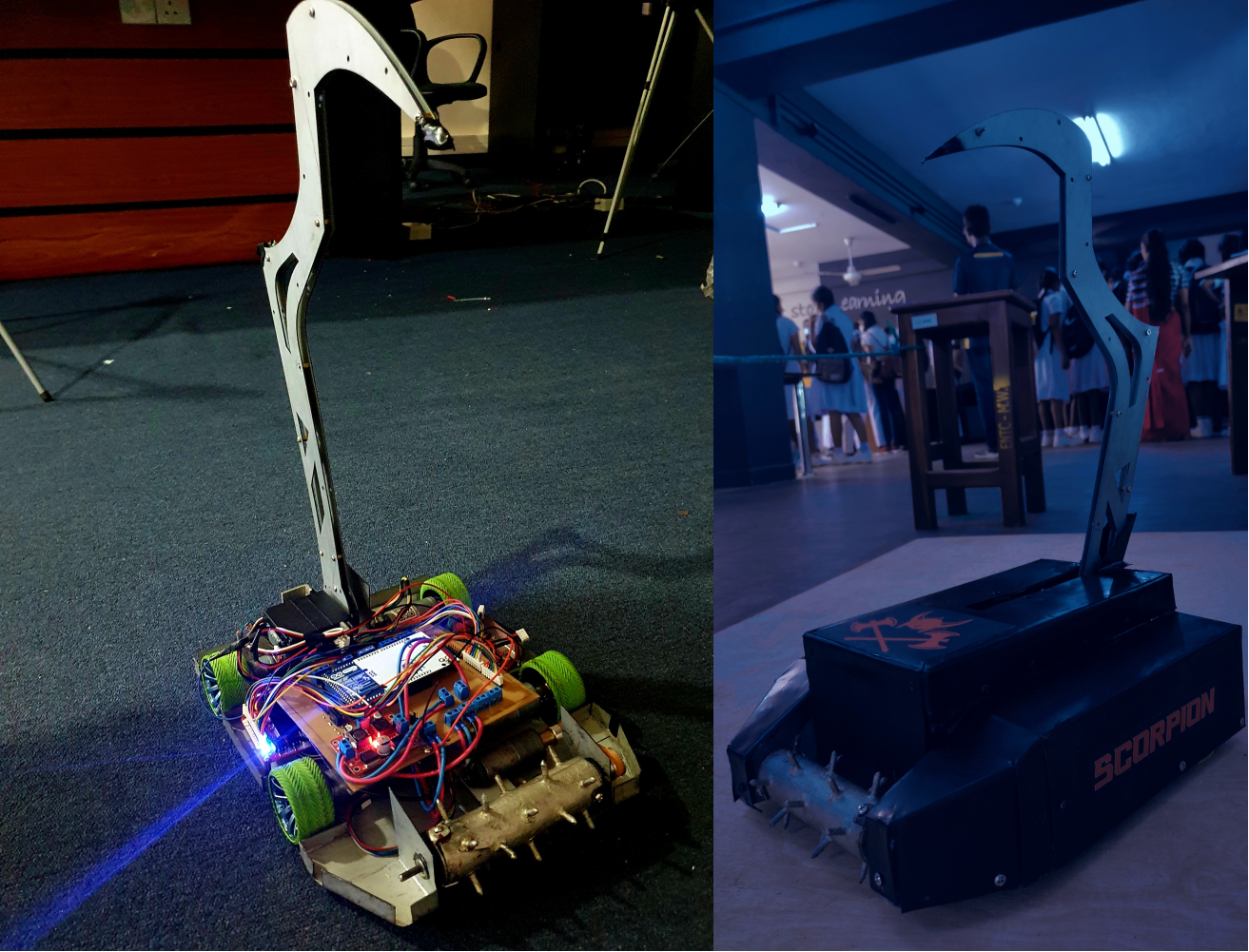

Battle Robot Design: Scorpion
2023Worked with a team to design a battle robot with separately powered weapons and navigation systems focusing on power management during battles to ensure maximum strength.
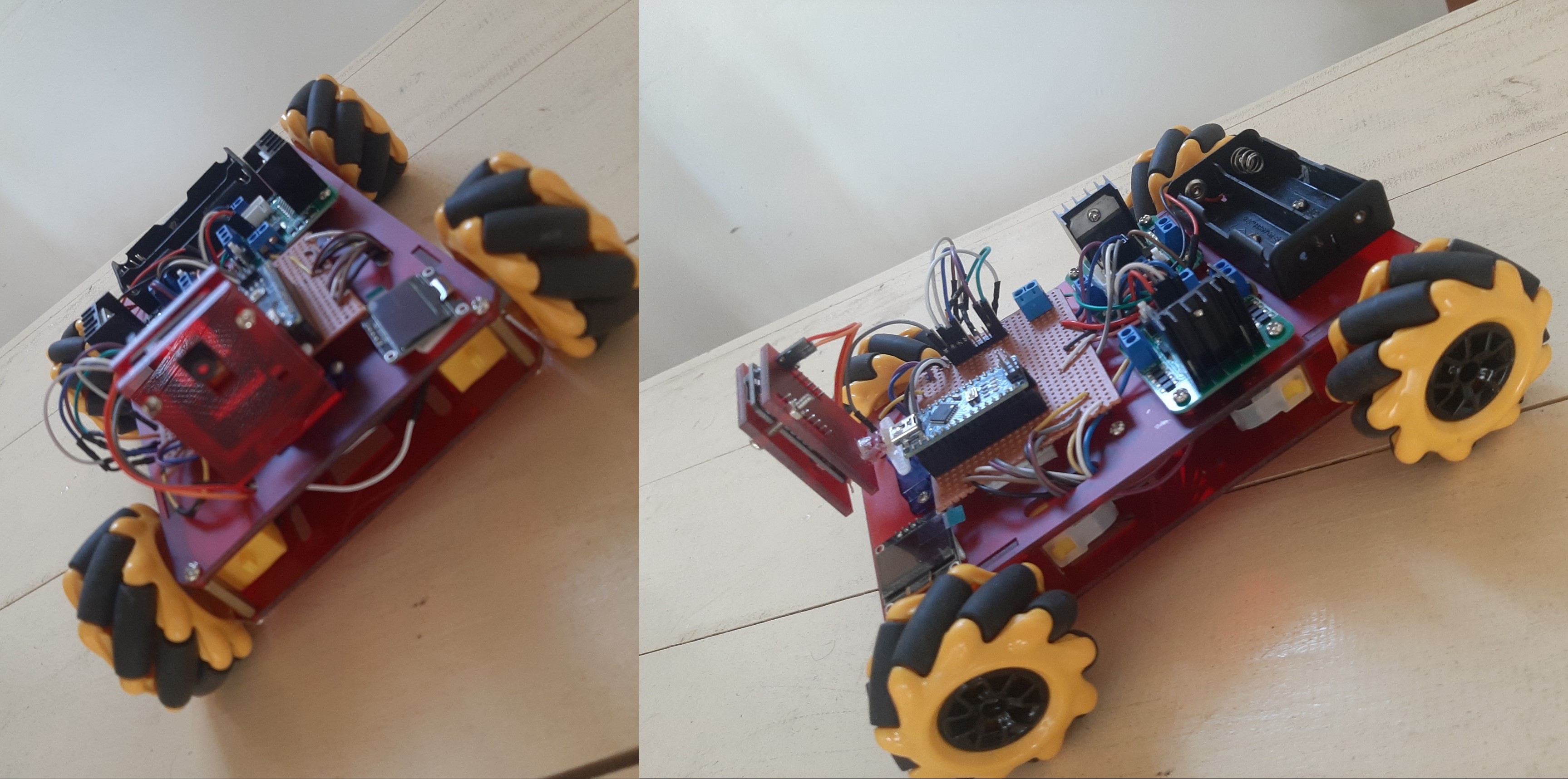
Mobile Robot: Navigation Based on Image Processing
2023Designed an ESP32 cam based mobile robot platform to share video feed with a server computer and take navigation commands. Implemented OpenCV functions to detect markers for autonomous navigation.
Sri Lankan Robotics Challenge (School Category)
2021Designed C++ based controllers for a custom robot to achieve multiple tasks in the competition finals, including floor pattern decoding, wall following, and simulated radar tasks.